Software im AVR...
Das Programm ist komplett in Assembler geschrieben. Es ist ein reines Interrupt-
Programm, alle Aufrufe von Programmteilen werden von Ereignissen
ausgelöst. Diese wären: ADC ist fertig, Impulsflanke am Eingang, Timer0-Überlauf und
Timer1-Überlauf. Wenn die jeweilige Interrupt-Service-Routine abgearbeitet ist, wird der AVR in
den 'Sleep-Mode' (Schlafen, Nixtun) geschickt, von wo er vom nächsten Hardware-Ereignis geweckt wird.
Die Programmteile und ihre Aufgaben:
- Analog-Digitalwandler (Vorteiler 128, Messdauer etwa 1,05ms):
- erste Schaltpunkt-Messung wird durch Reset-Routine aktiviert,
- jede weitere Schaltpunkt-Messung wird durch das Ende des Kanalimpulses aktiviert, denn
da ist genug Zeit für zwei Messungen während der MC schläft, und es kann kein Impuls-
Interrupt blockiert (verzögert) werden, was die Genauigkeit der Impulsmessung erhöht.
- ADC-Interrupt: wechselweise entweder:
- liest Schaltpunkt-Poti ein,
- errechnet daraus den Schaltpunkt (0...63),
- schaltet Quelle auf Betriebsart-Poti um.
- aktiviert nächste Messung...
- oder:
- liest Betriebsart-Poti ein,
- errechnet daraus Betriebsart (0...3) und Zeitwert (1...127),
- schaltet Quelle auf Schaltpunkt-Poti um,
nächste Messung wird erst nach Impulsende von Impuls-ISR aktiviert...
- Pegelwechsel (Flanke) am Impulseingang (wird durch Kanalimpuls ausgelöst):
- Steigende Flanke am Impulseingang (Eingangsimpulsanfang)
- setzt Timer1 auf 0 und startet ihn mit 100kHz (10µs je Wert),
- zählt im Zeitschalterbetrieb die Verzögerung und schaltet die Ausgänge nach Zeitablauf aus...
- Fallende Flanke am Impulseingang (Eingangsimpulsende)
- liest Timer1 aus (Eingangsimpulsbreite),
- sorgt dafür, dass die ersten 14 empfangenen Impulse verworfen werden und
der 15. Impuls als Neutralpunkt des Senders interpretiert wird, und
erst ab 16.Impuls nach dem Einschalten Schalthandlungen ausgelöst werden.
- stoppt Timer1,
- prüft Impulsbreite auf Gültigkeit (imin, imax),
- prüft Impulsabstand auf Minimalwert (mittels Timer0),
- schaltet nach mehreren ungültigen Impulsen (Anzahl in Konstante "errors") Ausgänge ab,
- setzt Timer0 auf Startwert (25,6ms vor Timeout für Impulsabstand),
- prüft, ob Eingangsimpuls Schwellwert überschritten hat und schaltet Blinker ein (nur Blinker-Mode),
- prüft, ob Eingangsimpuls Schwellwert unterschritten hat und schaltet Blinker aus (nur Blinker-Mode),
- prüft, ob Eingangsimpuls im Fangbereich ist und zählt 8 gültige Impulse ab (außer Blinker-Mode),
- errechnet im Zeitschalter-Mode die Verzögerung,
- aktiviert die nächsten zwei ADC-Messungen, da jetzt >18ms Zeit ist...
- Timer1-Überlauf (Sende-Impulsende, Überlauf bei Impulsmessung wegen zu langem Impuls):
- deaktiviert Timer1, (gemessener Impulswert ist dann 0, also illegal)...
- Timer0-Überlauf (Timeout vermisster Eingangsimpuls):
- setzt Timer0 auf Startwert (25,6ms vor Timeout),
- schaltet nach mehreren vermissten oder ungültigen Impulsen (Anzahl in Konstante "errors") Ausgänge ab,
- Reset-Routine (keine Interrupt-Routine, wird aber nur einmal beim Start ausgeführt):
- kalibriert den internen RC-Oszillator auf 1,6MHz,
- initialisiert beim Einschalten alle benötigten Ressourcen,
- aktiviert die ersten beiden ADC-Messungen...
- Hauptprogramm (keine Interrupt-Routine):
- schickt den AVR in den Schlafmodus, von dem er von einem der auftretenden Interrupts
geweckt wird. Dies erhöht die Genauigkeit der Timer, was aber hier keine große Rolle spielt...
Timing:
- Alle Programmteile (außer 'Schlafen' und 'Reset') laufen in Interrupts.
- Zwischen den Auslösungen des Impulsflanken-IRQ vergeht 1...20ms, genug Zeit zur Abarbeitung
- ADC wird immer nach Impulsende aktiviert, da sind min. 18ms Zeit, er braucht 2,1ms für beide Messungen
- Timer0-Int tritt nur im Fehlerfall auf (Impulsausfall), kann daher den Ablauf nicht stören
- Timer1-Int tritt nur im Fehlerfall auf (Impulsbreite zu lang), kann daher den Ablauf nicht stören
Somit ist bei Empfang gültiger Fernsteuerimpulse sichergestellt, dass kein Interrupt aufgerufen wird,
während noch eine andere ISR abgearbeitet wird.
|
 Der Schaltplan ist denkbar einfach. Die Stromversorgung erfolgt zusammen mit dem Fernsteuerimpuls
über einen bei Servos üblichen dreipoligen Steckverbinder. Der Fernsteuerimpuls wird über einen
Schutzwiderstand an den INT0-Eingang des AVR "Tiny15" gelegt, was eine präzise
Impulsbreitenmessung per Interrupt ermöglicht.
Die beiden Trimmpotis sind an analogtauglichen Eingängen angeschlossen, die Schalt-Transistoren
über Widerstände an die verbliebenen Anschlüsse. Für die meisten Fälle reichen
die verwendeten BC337/BC338 aus, man kann aber auch belastbarere Typen einsetzen. Über
die Steckbuchsen GND, SA0 (Schaltausgang 0) und SA1 (Schaltausgang 1) kann der Verbraucherstromkreis angeschlossen werden. Dieser kann mit Spannungen über 5V betrieben werden, z.B. mit 12V. Induktive
Lasten sind mit Freilaufdioden zu versehen, um die Transistoren gegen Überspannung zu schützen.
Der Schaltplan ist denkbar einfach. Die Stromversorgung erfolgt zusammen mit dem Fernsteuerimpuls
über einen bei Servos üblichen dreipoligen Steckverbinder. Der Fernsteuerimpuls wird über einen
Schutzwiderstand an den INT0-Eingang des AVR "Tiny15" gelegt, was eine präzise
Impulsbreitenmessung per Interrupt ermöglicht.
Die beiden Trimmpotis sind an analogtauglichen Eingängen angeschlossen, die Schalt-Transistoren
über Widerstände an die verbliebenen Anschlüsse. Für die meisten Fälle reichen
die verwendeten BC337/BC338 aus, man kann aber auch belastbarere Typen einsetzen. Über
die Steckbuchsen GND, SA0 (Schaltausgang 0) und SA1 (Schaltausgang 1) kann der Verbraucherstromkreis angeschlossen werden. Dieser kann mit Spannungen über 5V betrieben werden, z.B. mit 12V. Induktive
Lasten sind mit Freilaufdioden zu versehen, um die Transistoren gegen Überspannung zu schützen.
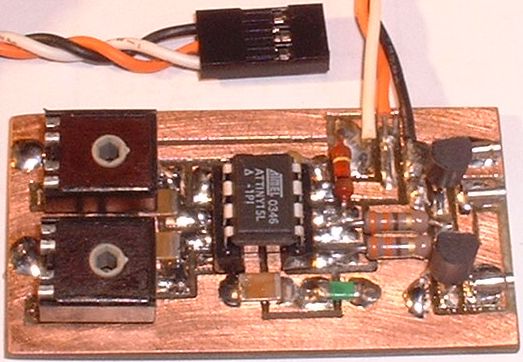 Nebenstehendes Bild zeigt den Versuchsaufbau des Schaltmoduls. Für den Dauereinsatz in Modellen
sollte aus Platzgründen eine kleinere Bauform entwickelt werden. Das fällt aber nicht in
meinen Zuständigkeitsbereich, ich bin nur für die Software verantwortlich...
Nebenstehendes Bild zeigt den Versuchsaufbau des Schaltmoduls. Für den Dauereinsatz in Modellen
sollte aus Platzgründen eine kleinere Bauform entwickelt werden. Das fällt aber nicht in
meinen Zuständigkeitsbereich, ich bin nur für die Software verantwortlich...