
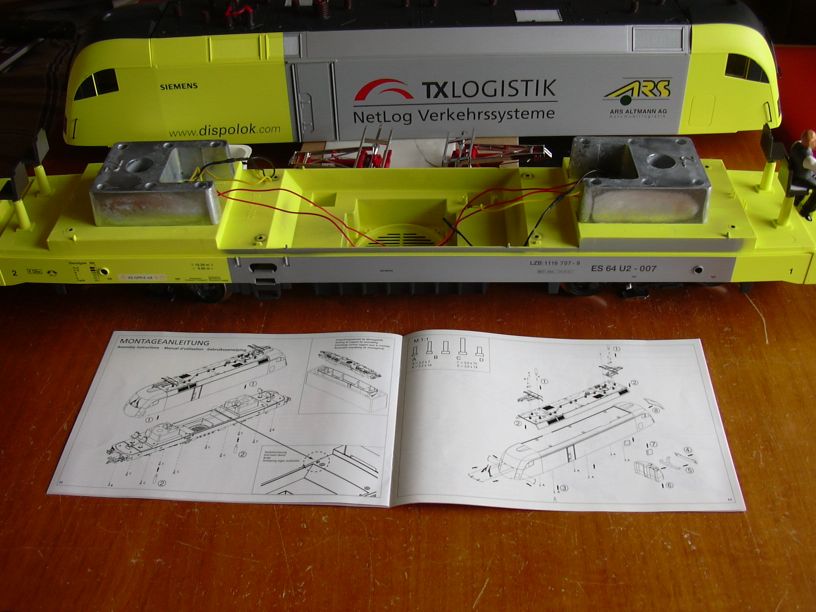
Dies ist das gute Stück...
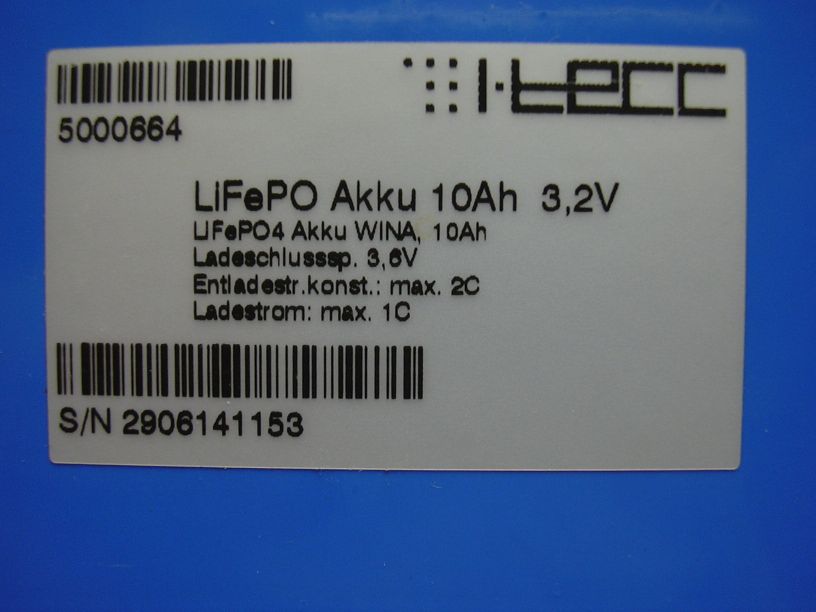
Vier dieser Lithium-Eisenphosphat-Akkus (3,2V / 10 Ah) sollten eingebaut werden. Um beim Einbauen Kurzschlüsse zu vermeiden, wurde erstmal eine Platine angefertigt, in die die 4 Zellen mit Muttern auf ihren M6-Anschlussbolzen eingeschraubt wurden.
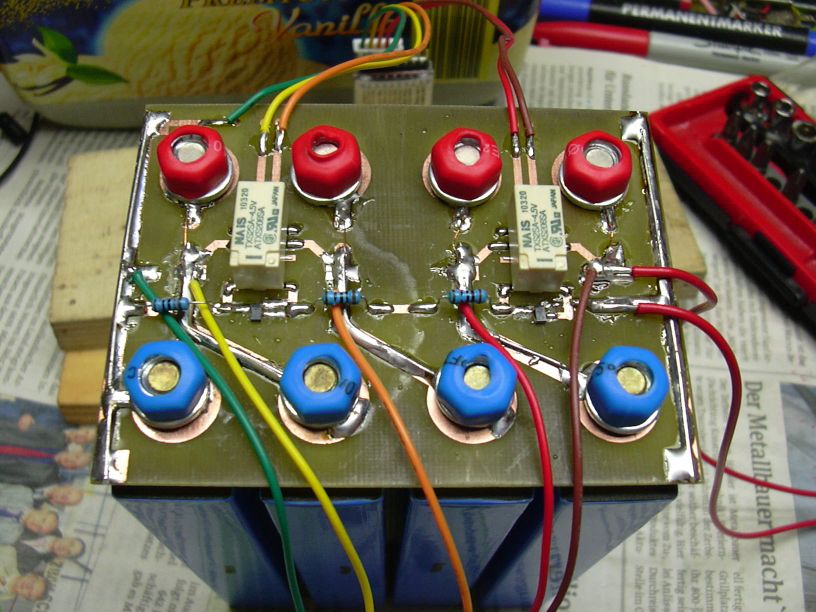
Diese Platine enthält direkt unter den Pluspol-Muttern 4 elektrische "Sollbruchstellen" (aus ausgewähltem dünnem Draht) als Sicherungen, wodurch jede Zelle einzeln gegen versehentlichen Kurzschluss abgesichert ist. Daran schließen sich die mit Draht verstärkten Leiterzüge zum Verbinden der Zellen zu einer vierzelligen Batterie mit 12,8 V Nennspannung. Die beiden roten Leitungen rechts führen zum Batterieschalter. Wird dieser eingeschaltet, ziehen auch die beiden auf der Platine befindlichen Relais an und verbinden den Akku-Alarm mit der Batterie. Dies ist erforderlich, damit der Akku-Alarm bei ausgeschalteter Lok allpolig (außer Minus) vom Akku getrennt wird und somit den Akku nicht entladen kann. Die 5 Leitungen am oberen Platinenrand führen zur Steckdose für den Akku-Alarm, die 5 Leitungen am unteren Platinenrand zu einem verpolungssicheren Steckverbinder, an dem die Ladebuchse angeschlossen wird. Die Schraubenmuttern der Zellenpole wurden mit farbigem Schrumpfschlauch isoliert, um versehentliche Kurzschlüsse zu vermeiden. Der Leiterzug am linken Platinenrand ist der Minus-Anschluss für die Schaltregler, der rechte Leiterzug der per Batterieschalter aktivierbare Plus-Anschluss. Diese dienen dann auch zur mechanischen Befestigung der 3 Schaltregler. Die Schaltregler sind noch nicht installiert, da noch nicht endgültig geklärt ist, wie die elektrische Verbindung zu den anderen Baugruppen (servicefreundlich) erfolgt. Die Widerstände auf der Platine dienen der Anpassung der Relais-Spulen (je 4,5 V / 400 Ohm) an die Gesamtspannung der Batterie und der Umgehung der Zellenverbinder-Leiterzüge.

Hier sieht man die Batterie mit eingeschaltetem Akku-Alarm. Die Zellen wurden bewusst mit etwas Abstand montiert, um sie thermisch voneinander zu trennen. Sollte eine Zelle durch einen Defekt warm werden, dann sollen die anderen Zellen dadurch nicht unnötig der Wärme ausgesetzt werden.

An der Seite des Unterbaus (Dieseltank?) der Lok wurde der Batterieschalter (links) und die 5-polige Ladebuchse (rechts) eingebaut. Diese sind dann in der Lok über Steckverbinder mit dem Akkupack verbunden.
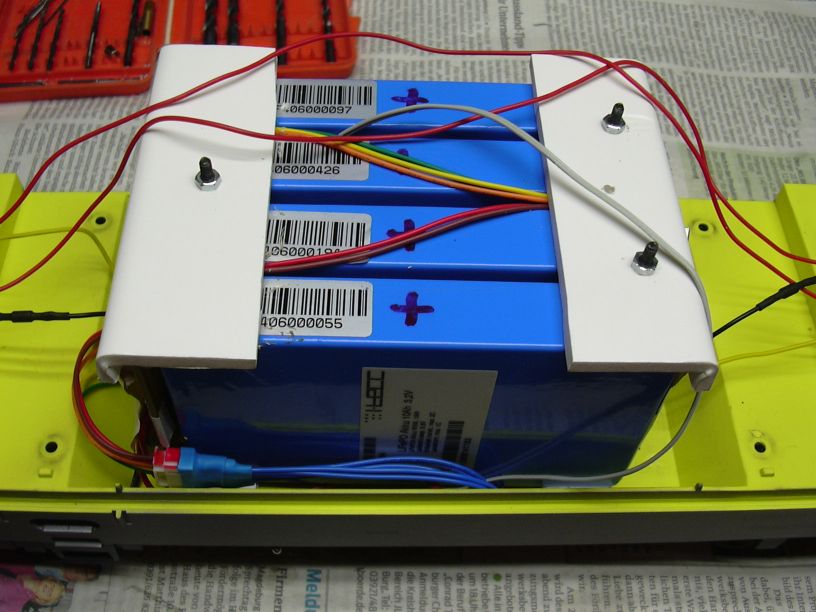
Der Akkupack wurde mit Distanzstücken zwischen den Zellen und Textil-Klebeband an den Zellenböden stabilisiert und mit 3 langen Schrauben M3 am Chassis festgeschraubt. Dabei kamen unter den Zellen Zwischenlagen aus PVC zum Einsatz und über den Zellen Winkel aus demselben Material. Links unten sieht man den Steckverbinder zur Ladebuchse. Das graue Kabel rechts unten führt zum Lautsprecher, der unter den Akkuzellen im Chassis montiert ist.
Da der komplette Akku etwa 60 Gramm schwerer als die beiden Gewichte der Lok ist, wurden die Gewichte ausgebaut, um Motoren, Getriebe, Akku und Fahrtregler nicht übermäßig zu belasten.
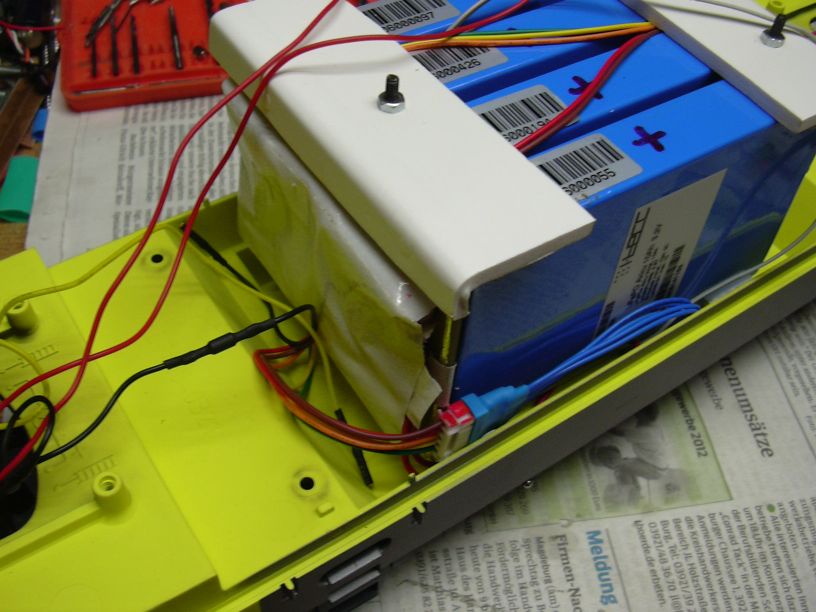
Die Akku-Platine wurde mit mehreren Lagen Textilklebeband abgeklebt, wobei darauf geachtet wurde, dass das Klebeband die Sicherungen nicht berührt. Vor dieser Akku-Platine soll später der Träger für die 3 Schaltregler montiert werden, als Befestigungspunkte sollen die Leiterzüge Minus und Plus an den seitlichen Kanten der Akkuplatine dienen. Die auf den Bildern zu sehende Original-Verdrahtung wird später entfernt, wenn die Elektronik (Fahrtregler, Lichtsteuermodul, Pantographensteuermodul, Pantographen-Motortreiber, SUSI-Soundmodul (von Doehler & Haass), Gaudi-Sondmodul und seine Steuerung, usw. eingebaut werden.

Das Gehäuse enthält einen Lithium-Ionen-Akku, einen Schaltregler, der daraus 5V macht, die etwas abgeänderte Platine einer Zweikanal-Funkfernsteuerung (für Modell-Rennsport, also Rennautos, Rennboote in Pistolenform) mitsamt der Antenne.
Momentan ist Software-Entwicklung angesagt. Es muss ein Lokfahrtregler geschaffen werden, der auf die Impulsbreiten unterschiedlicher RC-Systeme angelernt werden kann. Das betrifft einmal die durch die Matrix-Tastatur generierten Impulsbreiten auf Kanal 1 und die vom Fahrpoti (mit Mittelrastung) generierten Impulsbreiten auf Kanal 2 (und Kanal 3 für Funken mit 2 Fahrpotis). Bis dahin läuft aber noch allerhand Wasser von der Pleiße bei mir (an der Elbe) vorbei.
© 07/2014 by Hannes